The MOTION project aims to develop an advanced vision system for the automated exterior inspection of vehicles. It leverages deep learning algorithms, image stitching, and Structure from Motion (SfM) to achieve accurate 3D reconstructions, while addressing challenges such as reflections and special capture conditions. The solution enables damage detection, the production of high-quality panoramic images, and improves both the speed and reliability of inspections, with the prospect of integrating LiDAR data for even more precise representations.
Goal
The MOTION project was designed to advance the automation of vehicle exterior inspections through the integration of state-of-the-art computer vision and 3D modeling techniques. The goal was not only to detect and document damages more effectively, but also to increase the speed, accuracy, and reliability of the inspection process.
In particular, the project aimed to:
Develop an advanced vision system capable of automated exterior inspection of vehicles.
Leverage deep learning algorithms, image stitching, and Structure from Motion (SfM) to achieve accurate 3D reconstructions.
Overcome challenges posed by reflections and difficult capture conditions.
Enable damage detection and the production of high-quality panoramic images for comprehensive inspection records.
Lay the groundwork for future enhancements, including the integration of LiDAR data for even more precise reconstructions.
Methodology
The project followed a methodology that combined computer vision, machine learning, and 3D reconstruction techniques to create a reliable automated inspection pipeline. The process began with data acquisition, capturing multiple images of vehicle exteriors under varied conditions.
The workflow involved:
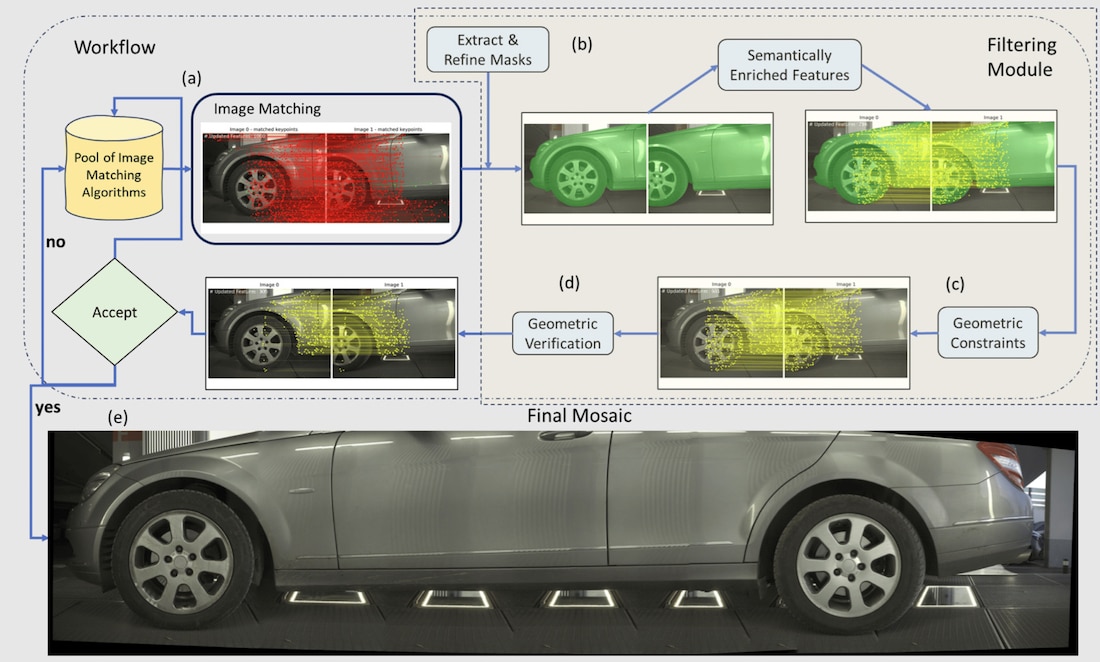
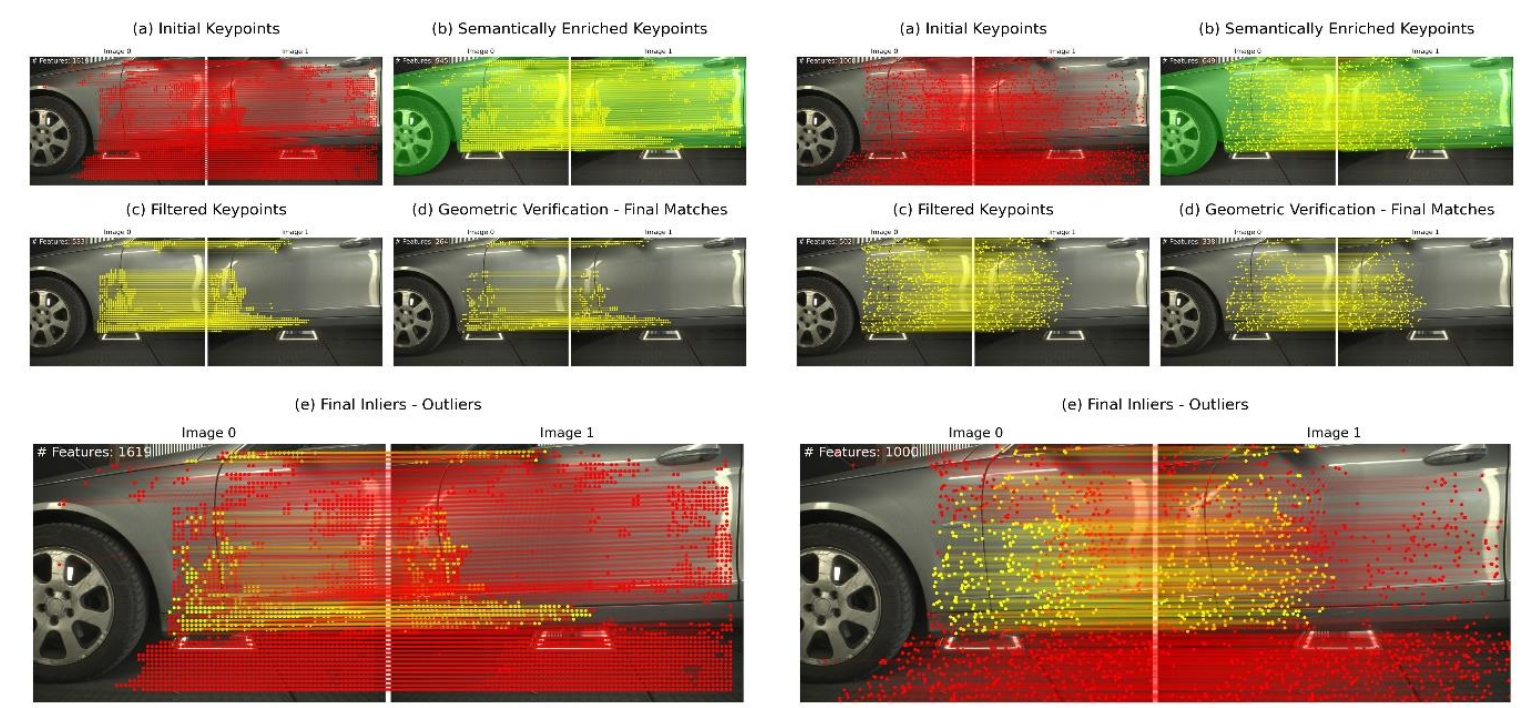
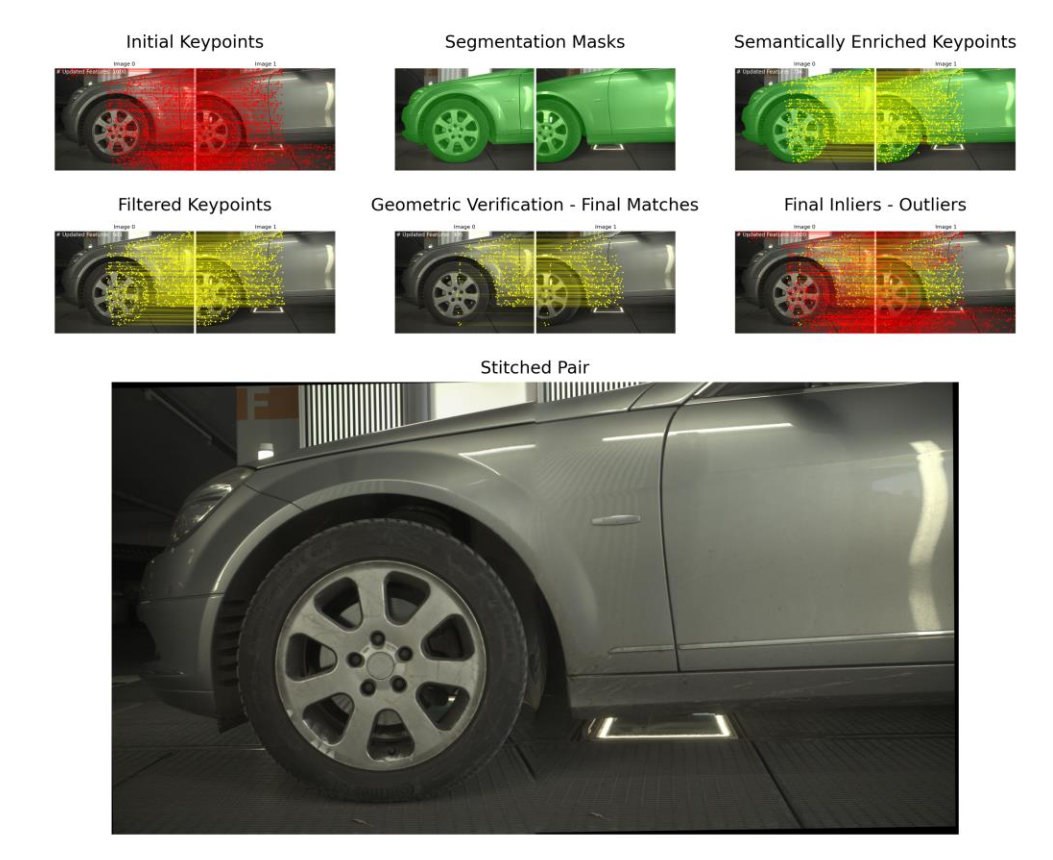
Image stitching and SfM to align and reconstruct 3D representations of the vehicle surfaces.
Deep learning algorithms applied to analyze images and identify potential damages with high accuracy.
Processing pipelines tailored to handle reflections and special capture conditions that typically complicate inspection.
The solution produced high-quality panoramic images and accurate 3D reconstructions, validated for damage detection and inspection reliability. Looking ahead, the methodology was designed to be expandable with LiDAR integration, enabling even more detailed and precise digital representations.