Structured Light Scanner
The aim of this work is the integration of modern methods and the development of innovative algorithms to create a 3D scanning system consisting of a simple digital camera (DSLR) and a video projector. This structured light system is based on projecting different light patterns, via the projector, onto the surface of a 3D object, which are then captured by the camera. Automatic pattern recognition in the images enables the reconstruction of the shape of the scanned 3D objects through triangulation of the optical rays corresponding to homologous pixels of the projector and the camera.
It is also possible to generate models textured with real photographs, simulating both the geometry and the appearance of the three-dimensional world.
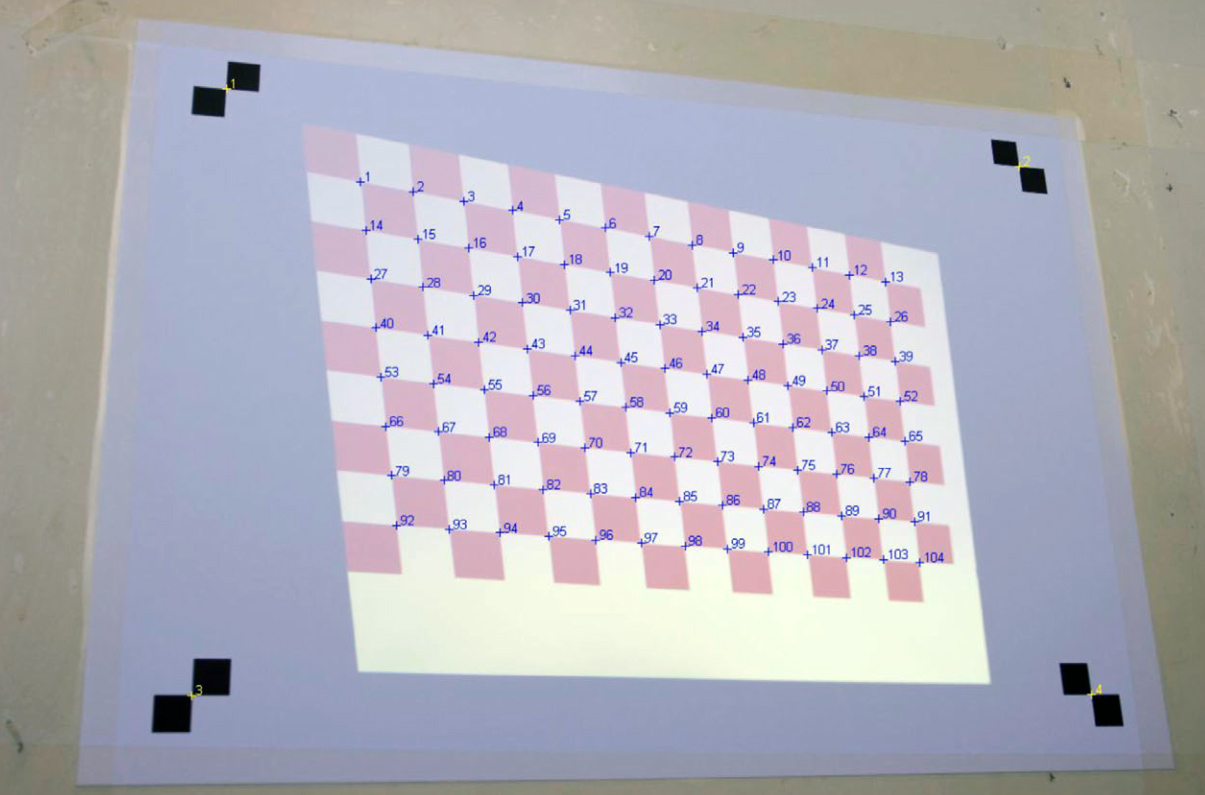
The system is calibrated in a single step by projecting a colored checkerboard pattern onto a marked planar surface. The calibration board is rotated in space so that multiple perspectives can be captured by the camera. The targets and corners of the projected pattern are automatically detected in the images with sub-pixel accuracy, enabling precise estimation of the system’s internal and external parameters through bundle adjustment.
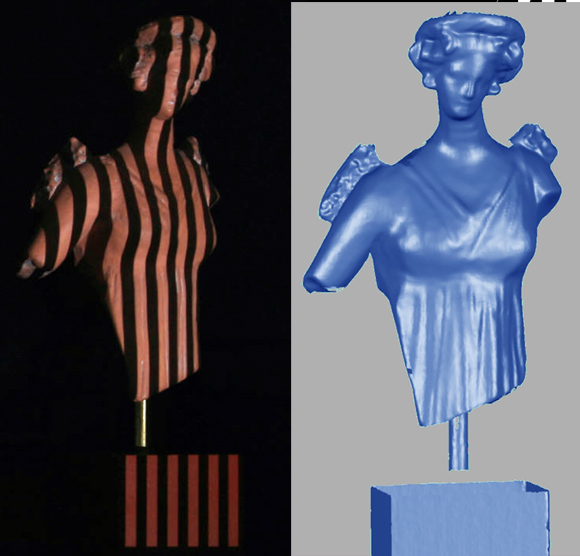
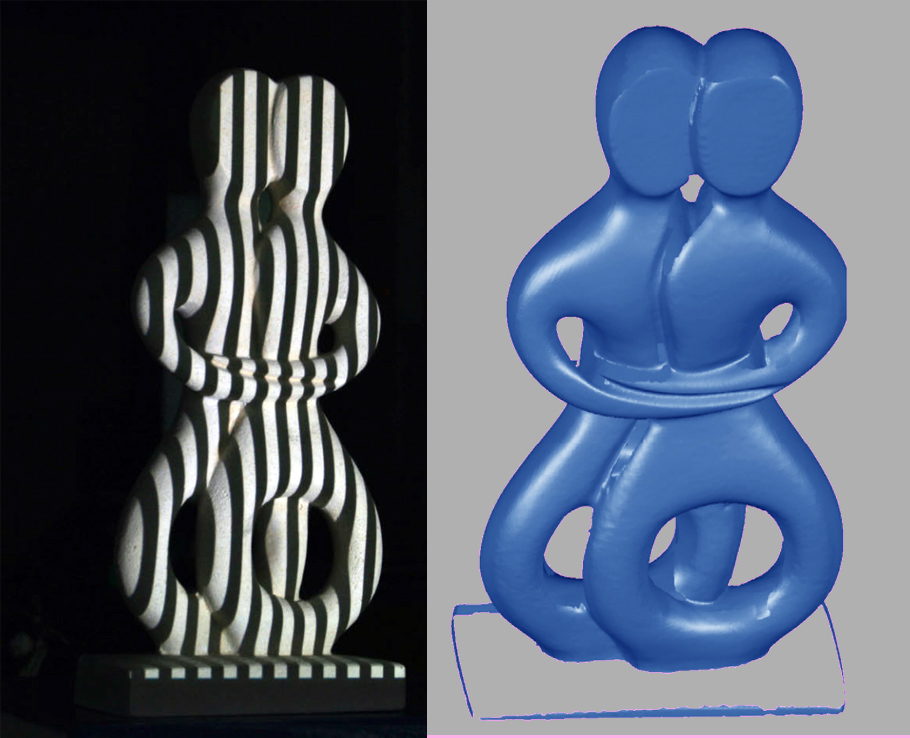
The scanning process is implemented by projecting Gray-code binary patterns (horizontal and vertical stripes) onto the unknown 3D surface. This ensures a one-to-one correspondence of homologous pixels between the camera and the projector. Additional correspondences are computed with sub-pixel accuracy to improve the fidelity and smoothness of the final 3D reconstruction, which is carried out through standard photogrammetric forward intersection.
Publications
-
2011: A structured-light approach for the reconstruction of complex objects.
XXIII CIPA International Symposium, Prague, 12–16 September -
2011: Δημιουργία Οπτικού-Φωτογραμμετρικού Σαρωτή για την Αυτόματη 3D Ανακατασκευή Μικρών Αντικειμένων.
Τεχνική Έκθεση Ερευνητικού Προγράμματος, Τμήμα Τοπογραφίας, ΤΕΙ Αθήνας