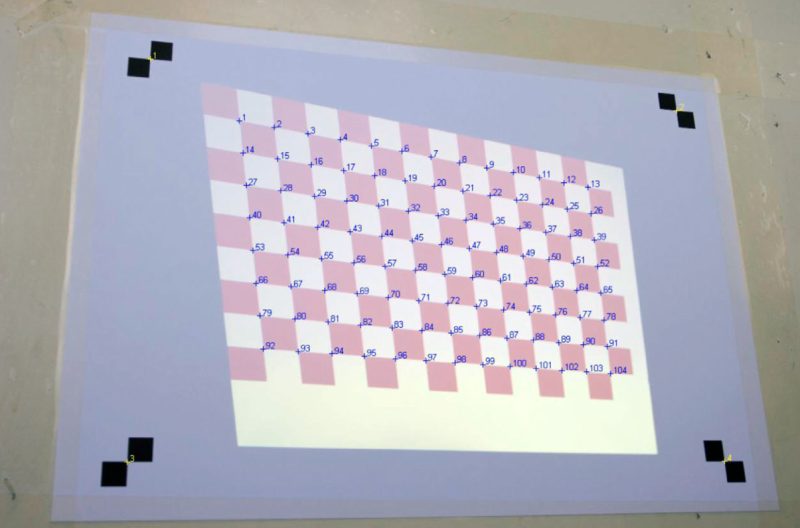
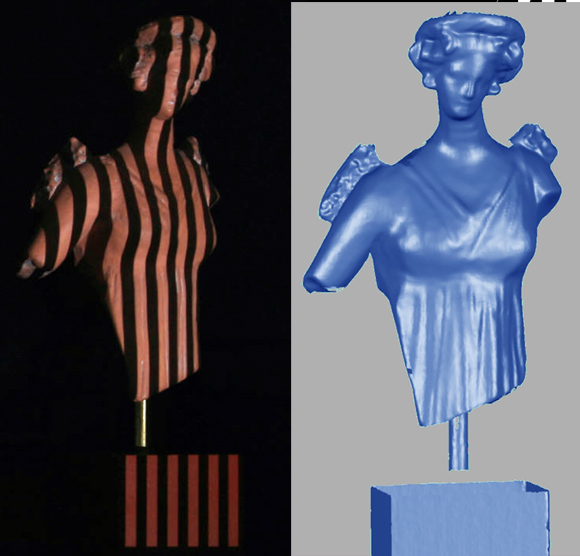
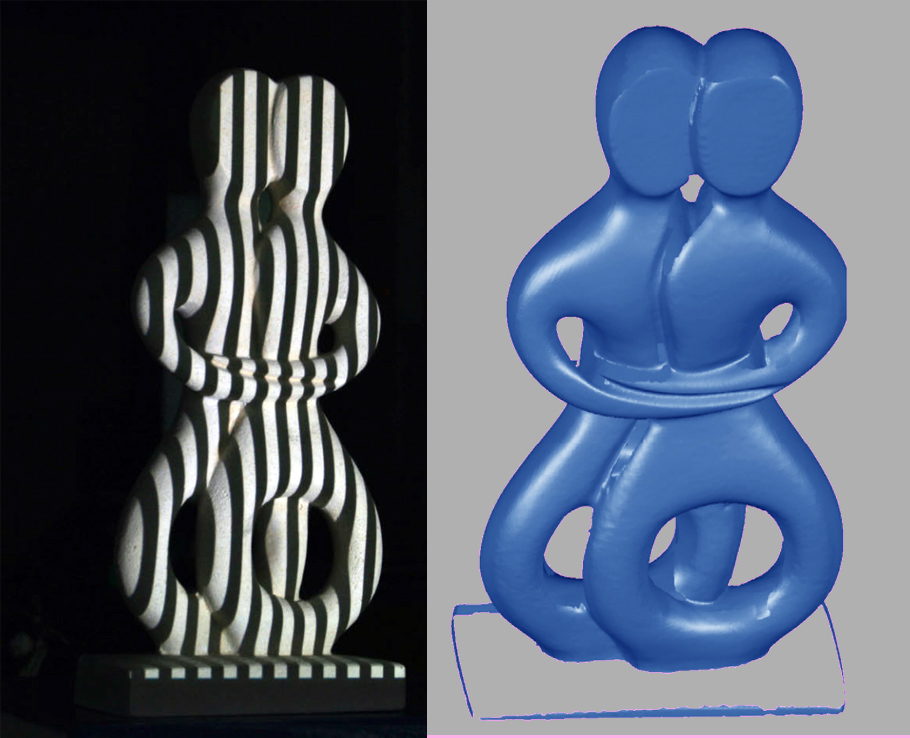
Subject of this research project is a synthesis of state-of-the-art as well as the development of novel algorithms, in order to implement a 3D scanning system consisting of one consumer digital camera (DSLR) and a video projector. This Structured Light system relies on the projection of different light patterns, by means of a video projector, on 3D object surfaces, which are recorded by the digital camera. Automatic pattern identification on images allows reconstructing the shape of recorded 3D objects via triangulation of the optical rays corresponding to projector and camera pixels. Models draped with realistic photo-texture may be thus also generated, reproducing both geometry and appearance of the 3D world.